宁波2022年8月16日 /新闻稿网 - Xinwengao.com/ — 近日,由盖世汽车、AUTOSAR组织联合主办,AUTOSEMO指导的2022第三届软件定义汽车论坛暨AUTOSAR中国日在武汉举办。均联智行首席架构师汪浩伟博士受邀在会上发表演讲,分享基于SOA框架设计的人机共驾系统的思考。此次论坛吸引了近1000位业内人士参与,首日在线观看直播人数超过10万。
安全至上 理性的智能化设计
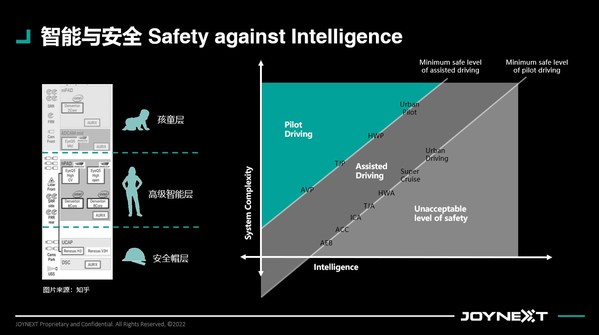
智能驾驶的发展的初衷是为了解决危险驾驶这个终极难题,安全是智能驾驶的第一要素。但只有安全还不够,系统还要做到足够智能,才能真的体现他在实际生活中的价值。用户都希望自动驾驶辅助是个"老司机"而不是"萌新"。
目前的智能驾驶技术中,安全和智能在某种程度上存在矛盾之处。更高的智能会带来更多的安全上的挑战。因此需要在设计系统时就明晰安全边界,因为系统的成本框架会定义其复杂度,也就是定义其不同场景的功能和安全极限。

安全与智能的矛盾
基于SOA架构的人机共驾系统为舱驾融合提供基础
在未来较长的一段时间内,高智能的自动驾驶系统(L2++)会在乘用车上占据主导地位,驾驶员与智能系统同时共享对车辆的控制,人机结合完成驾驶任务。在人机共驾系统内,驾驶员和自动驾驶的交互十分重要,不单影响使用体验,也影响自动驾驶系统的安全性。为了能满足用户对于智能的要求,同时能做到足够安全,需要深入融合智能驾驶与智能座舱两大领域,让自动驾驶辅助成为陪伴司机的人工智能助手。我们称之为Co-Pilot AI.
在现有域控平台上开发Co-Pilot AI会在通讯,系统交互和统一化设计上遇到很多挑战,因此均联智行CCU与SOA以用户体验驱动为核心,设计可灵活部署、成本可控、满足未来座舱和自动驾驶深度融合的解决方案。在汪浩伟看来,基于SOA框架开发的人机共驾系统,能以最好的效率整合智能座舱、智能驾驶和驾驶员监控系统已有能力,并且充分发挥微服务框架的架构设计领先性。
区域–中央架构垂直分工 更加清晰的功能分配
汽车电子电气架构的发展推动了整个汽车行业开发方式的转变以及产品迭代速度的变化。从分布式到集中网关,到目前正在经历的以域控制器为核心,有中央化的功能和中央化的供电方案。再到几年后进入中央计算架构(区域-中央架构),其特点之一是软件比较彻底地从硬件剥离,软件开发不再受硬件的桎梏,另一点是区域控制器会将汽车物理信息系统进行分割。
汪浩伟强调,中央计算平台不等于"吸收"传统ECU的所有功能,区域–中央架构提出了一种垂直分割的功能分层,而非"一站式"的解决方案。在区域-中央架构内,每一层都有清晰的职责:中央计算单元是全车的"大脑",负责处理高层信息并决策所有行为。

区域-中央架构的功能分配
当前汽车正面向自动化、智能化、网联化发展,软件在汽车中日益扮演着重要角色,需要以SOA框架和云原生的方式来支撑座舱域、自动驾驶域及其他功能的开发,在减少不必要冗余的同时满足多域之间频繁的信号交互需求。
软件定义汽车时代,整车的价值将不再由传统的机械硬件决定,而是由软件以及与软件所适配的电子硬件决定。均联智行立足场景与交互,挖掘SOA框架的价值,以实现用户思维和用户核心价值在智能驾驶汽车上的落地,带给用户更好的出行体验及安全性。